Descriere proiect:
Soclu rotitor pentru rotirea obiectelor la 360 de grade. In loc sa rotesc scanner-ul în jurul obiectului prefer sa rotesc obiectul și sa țin scanner-ul fix. Din acest motiv am nevoie de un soclu care se rotește cu o viteaza mica constantă. In următoarea fază ar trebui în spatele obiectului sa așez un panou alb pentru ca fundalul sa nu interfereze cu scanner-ul și cu obiectul.
Documentatie proiect:
M-am inspirat de pe pagina : Control a Stepper Motor with A4988 Driver and Arduino
Componente:
- Motor NEMA17
- Driver A4988
- Arduino Mega
- Cabluri de conectare
- Breadborad
- Suport motor și suport soclu printate 3D (modelele in thingverse)
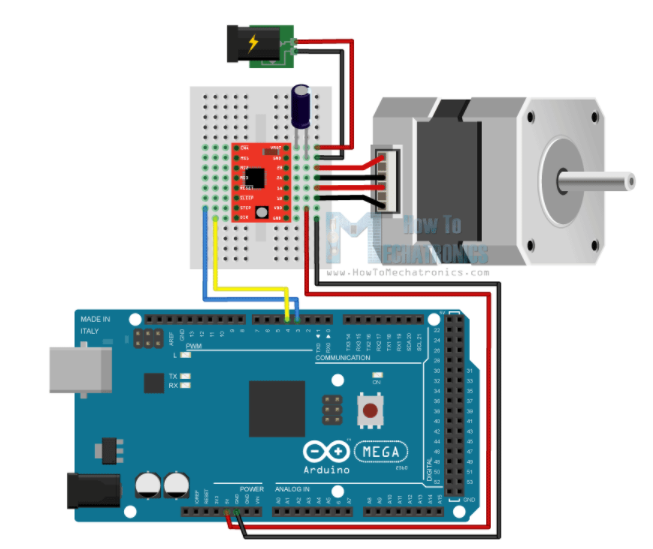
Schema electronica:



Cod de test:
Weekend plăcut tuturor !
Soclu rotitor pentru rotirea obiectelor la 360 de grade. In loc sa rotesc scanner-ul în jurul obiectului prefer sa rotesc obiectul și sa țin scanner-ul fix. Din acest motiv am nevoie de un soclu care se rotește cu o viteaza mica constantă. In următoarea fază ar trebui în spatele obiectului sa așez un panou alb pentru ca fundalul sa nu interfereze cu scanner-ul și cu obiectul.
Documentatie proiect:
M-am inspirat de pe pagina : Control a Stepper Motor with A4988 Driver and Arduino
Componente:
- Motor NEMA17
- Driver A4988
- Arduino Mega
- Cabluri de conectare
- Breadborad
- Suport motor și suport soclu printate 3D (modelele in thingverse)
Schema electronica:


Cod de test:
// defines pins numbers
const int stepPin = 3;
const int dirPin = 4;
void setup() {
// Sets the two pins as Outputs
pinMode(stepPin,OUTPUT);
pinMode(dirPin,OUTPUT);
}
void loop() {
digitalWrite(dirPin,HIGH); // Enables the motor to move in a particular direction
// Makes 200 pulses for making one full cycle rotation
for(int x = 0; x < 200; x++) {
digitalWrite(stepPin,HIGH);
delayMicroseconds(60000);
digitalWrite(stepPin,LOW);
delayMicroseconds(60000);
}
}
Urmează încapsularea controlerului și să-i adaug bluetooth sau un potențiometru pentru controlul vitezei.
Weekend plăcut tuturor !